



Drošības scenārijos uzraudzības aprīkojums bieži tiek pakļauts vējam - Izraisītas svārstības, kas saistītas ar garu - attāluma uzstādīšanu. Kamēr kamera ir plats - Leņķa režīms parāda minimālu jutīgumu pret ārējiem traucējumiem, telefoto režīms Optiski pastiprina mehāniskās vibrācijas, izraisot ievērojamu attēla izplūšanu vai pat mērķa fokusa zudumu. Līdz ar to Aktīvie stabilizācijas mehānismi ir parādījušies kā kritiska tehniskā prasība ilgstošām - diapazona uzraudzības sistēmām. Pašreizējās stabilizācijas tehnoloģijas galvenokārt ietilpst divās kategorijās: Optiskā attēla stabilizācija (OIS) un Elektroniskā attēla stabilizācija (EIS).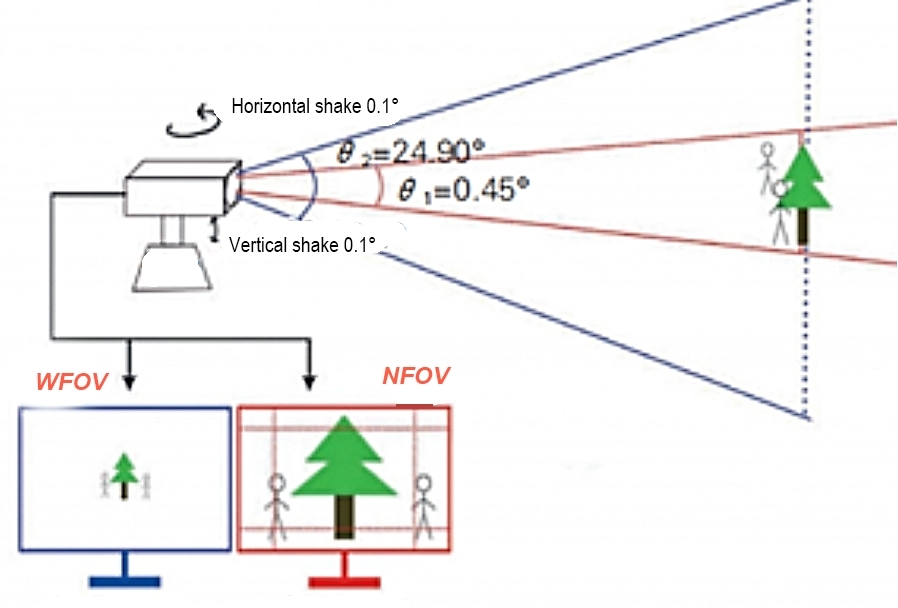
EIS izmanto attēla pastu - Apstrādes algoritmu, lai panāktu attēla stabilizāciju. Tas prasa, lai pašreizējais šāviens tiktu palielināts, kā rezultātā rodas 10% - 20% zaudējumi uzraudzības redzamības laukam. EIS tehnoloģijā objektīvs ir atbildīgs tikai par attēla iegūšanu. Pēc tam, kad sensors veido attēlu, tas vispirms ir jāatstāj attēlam, izmantojot iebūvēto - attēlu procesora kodola algoritmā, un pēc tam video tiek saspiests un pārsūtīts. Šāda veida attēla stabilizācija tiek pilnībā panākta, izmantojot digitālās apstrādes tehnoloģiju, kas samazina video kvalitāti un kurai ir vispārējs stabilizācijas efekts. To parasti izmanto zemā - gala produktos to izmaksu priekšrocību dēļ.

OIS izmanto iebūvētu - žiroskopā objektīva montāžā, lai noteiktu kameru vibrācijas. Žiroskops pārveido mehāniskās kustības datus elektriskos signālos, kas pārnesti OIS kontrolierim. Kontroliera centrālā apstrādes vienība nekavējoties analizē un aprēķina pārvietojumu vai leņķi, kas objektīvam ir jākompensē, un izmanto elektromagnētisko spēku, ko veido trīs spoles un magnētu komplekti caur piedziņas motoru, lai precīzi virzītu objektīvu, lai noturētu optisko ceļu un izvairītos no attēla izplūšanas, ko izraisa kratīšana. Optiskā dizainā, pievienojot pārvietojamu objektīvu, objektīva maiņu kontrolē, pamatojoties uz kratīšanas daudzumu, kompensējot optisko ceļu atpakaļ stabilā stāvoklī.
Katrā ekspozīcijas ciklā OIS secīgi jāizpilda: vibrācijas noteikšana, signāla apstrāde un kompensējošā objektīva iedarbināšana. Viss process ir servo kustība, kurai ir arī īsa noteikšanas laika, ātras signāla apstrādes ātruma, maza objektīva kompensācijas kustības īpašības un tiek pieņemts vienkāršs un samērā stabils PID vadības algoritms.